SYNCRO
RESEARCH
PHYSICAL AI

4 mins
|
16 Apr 2026
The question sounds simple. The answer, it turns out, is anything but. A human doing the same thing doesn't think about it — they reach, adjust, sense the other person's pace, and complete the transfer without a second thought. Robots have none of that intuition. They must sense the object, track each other's motion, anticipate the moment of transfer, and execute it without hesitation or collision — every single time, even when something gets in the way.
This is the problem Debojit Das set out to solve at the IITGN Robotics Laboratory, Indian Institute of Technology Gandhinagar, working in collaboration with Addverb Technologies. The result is a control framework that makes robot-to-robot handovers smoother, more reliable, and genuinely robust to the unpredictability of real industrial environments.
The Problem with Waiting
In most robotic systems, a handover is treated as a sequence: pick up, move to position, wait for the other arm, transfer, done. It's a tidy pipeline — and it breaks the moment anything deviates from the script.
If one arm arrives at the handover point too early, it waits. That wait wastes time, creates awkward tension in the system, and in some configurations can compromise safety. If an obstacle forces one arm to take a longer path, the other arm has no way of knowing — it either waits indefinitely or attempts the transfer at the wrong moment.
In real warehouses and factories, these small disruptions are not exceptions. They are the norm. Timing that's perfectly planned on paper unravels the moment the environment changes.
Three core challenges defined this project:
How can two arms adapt to each other's pace in real time, without a shared script?
How can that coordination survive when one arm must detour around an obstacle?
How can the system remain stable across different robotic platforms and object types?
A Shared Sense of Progress
The insight at the core of Debojit's approach is borrowed from how humans naturally coordinate: two people walking toward a meeting point don't count steps — they read each other's pace and adjust continuously.
The framework he developed gives both robot arms a shared sense of progress. Rather than following fixed trajectories and hoping they align, each arm monitors how far along it is relative to the other and adjusts its speed accordingly. If one arm slows to navigate around something, the other slows too. Both still arrive together.
How It Works
The system operates in two modes that blend smoothly into each other:
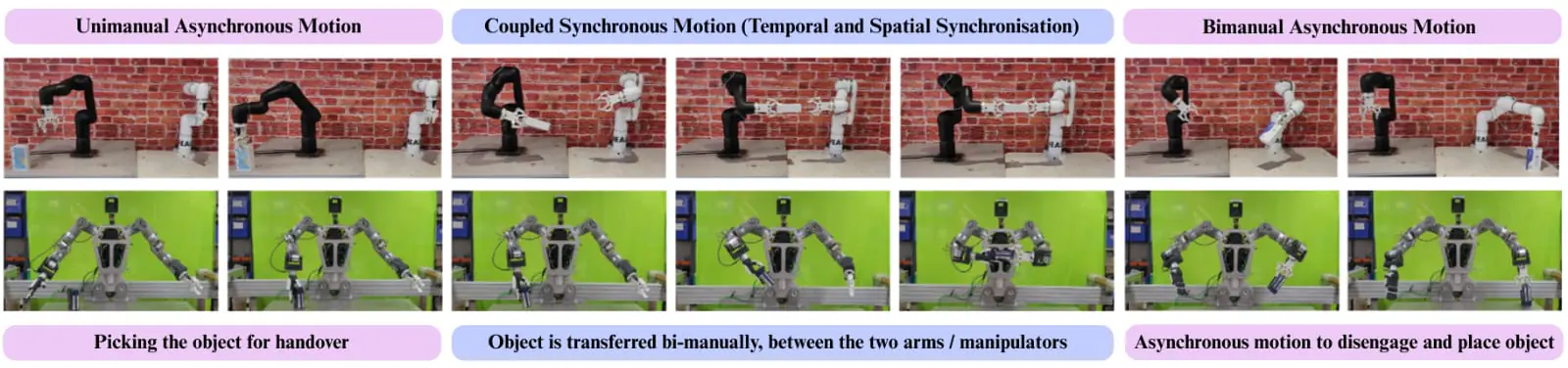
Asynchronous mode: Each arm moves independently to its starting position — no coordination needed yet.
Synchronous mode: As both arms approach the handover point, a shared clock phase-locks their motion in both position and orientation. Neither arm can complete the transfer until both are ready.
The transition between these modes is governed by two scalar gates that activate coupling progressively — not as a hard switch, but as a smooth handoff from independent to coordinated motion.
Crucially, this coordination applies to both position and orientation simultaneously. It's not enough for both arms to arrive at the same point — they must also be oriented correctly relative to each other and to the object being transferred.
Navigating Around Obstacles
The second piece of the framework handles what happens when the path isn't clear.
Rather than stopping to replan — which breaks timing and coordination — the system uses an obstacle modulation layer that bends the arm's path smoothly around any obstacle in real time. The arm deviates, the other arm senses the change in pace through the shared clock, and both adapt. The handover still happens. The synchrony is preserved.
Think of it as the robotic equivalent of two people navigating a crowded corridor together — one steps aside, the other adjusts, and they meet where they need to.
Tested on Real Hardware — Including Syncro 5
The framework wasn't validated in simulation. It was built and tested on physical robotic systems — the kind that operate in real industrial settings.
Two platforms were used:
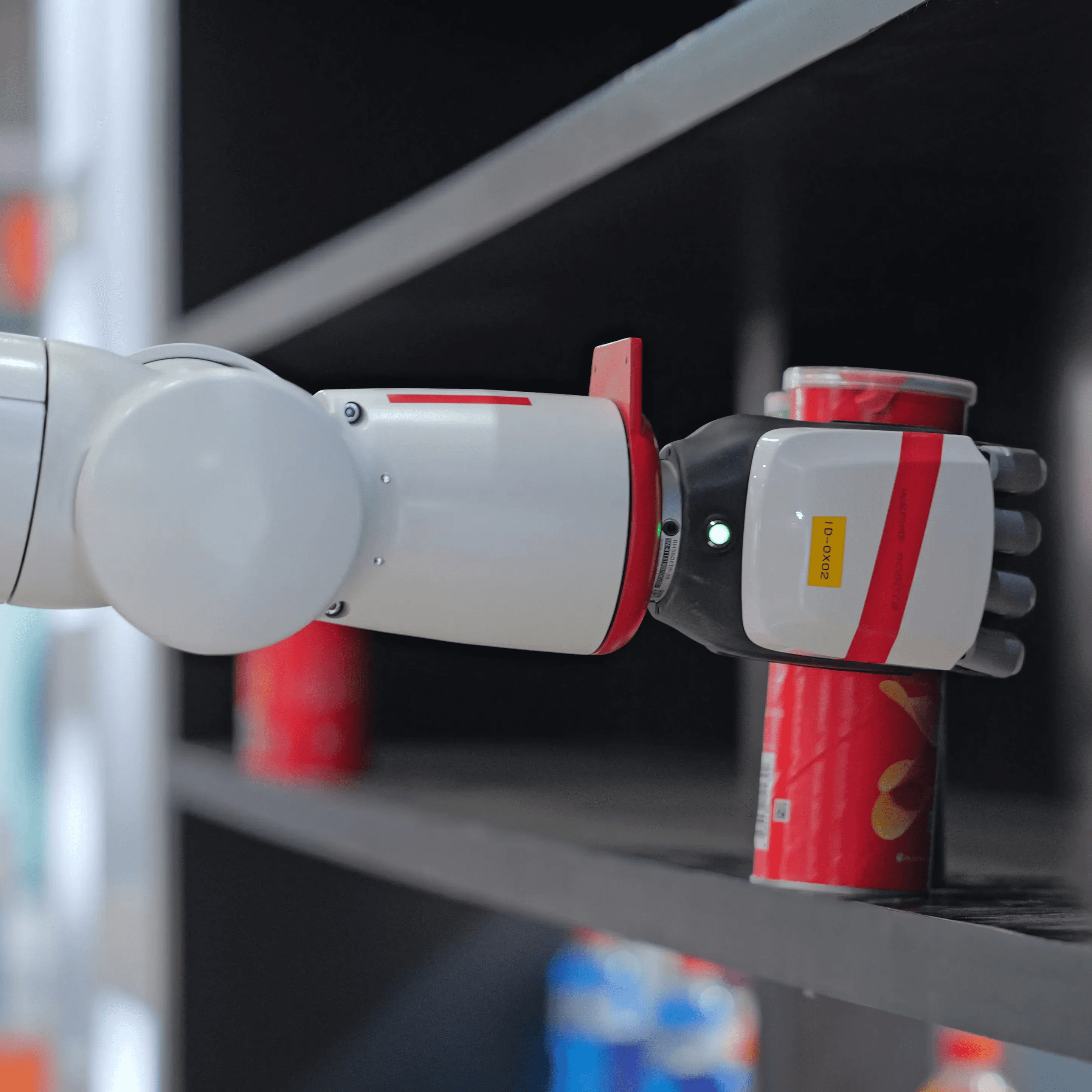
Two Addverb Syncro 5 (6-DoF) cobot arms with parallel-jaw grippers — validating the framework in an industrial manipulation context.
Addverb's humanoid robot with a dexterous hand on one arm and a parallel-jaw gripper on the other — testing whether the same framework could generalise to a fundamentally different morphology.
The same algorithm ran on both. Box transfers. Bottle transfers. Scenarios with obstacles introduced mid-motion. In every case, position and orientation errors converged to zero — both arms arriving at the handover point in sync, even when paths were distorted.
What the Numbers Show
With the synchronisation coupling active, every transfer succeeded — five out of five trials for both box and bottle. Without it, box transfers failed entirely and the bottle succeeded only once in five attempts. Disabling synchronisation causes one arm to arrive prematurely, which triggers collisions or drops.
The difference isn't marginal. The coupling is the thing that makes the handover work.
When the Plan Meets Reality
Like Shreya and Akshay's work on motion retargeting, this project surfaced a lesson that only real hardware can teach.
Coordination in theory is clean. Coordination in practice involves physical arms with inertia, grippers that aren't perfectly rigid, and objects that shift slightly on pickup. The framework had to account for not just the mathematical correctness of the handover, but its functional reliability under real conditions.
The orientation constraint — ensuring both arms were aligned in direction and intent, not just position — proved essential. Without it, the system could produce geometrically valid configurations that were functionally wrong: arms arriving at the same point but oriented in ways that made the transfer impossible.
This is what working on real hardware forces you to confront. The gap between a solution that works on paper and one that works in a warehouse is closed only by building and testing and iterating on physical systems.
Presented at the World Stage
The research has been recognised at the highest levels of the international robotics community.
Presented as a late-breaking results poster at the 2025 IEEE-RAS 24th International Conference on Humanoid Robots in Seoul, South Korea
Accepted for publication at the 2026 IEEE International Conference on Robotics and Automation (ICRA) in Vienna, Austria
Shared with the broader ROS developer community through a ROS Talk at ROSCon India
Why This Matters for Automation
Robot-to-robot handovers are not an edge case in industrial automation — they are a core operation. Assembly lines, sorting facilities, pick-and-pack warehouses: everywhere that objects move through a sequence of robotic operations, there is a handover moment. And every one of those moments is currently a point of fragility.
A framework that makes handovers adaptive, obstacle-aware, and temporally robust doesn't just improve one operation. It changes what's possible across an entire facility.
More resilient automation: Systems that recover from small disruptions without stopping or replanning
Safer human-robot collaboration: Coordination logic that can extend to human-robot handovers, not just robot-robot
Platform-agnostic deployment: The same framework validated across industrial arms and a humanoid — it doesn't require custom hardware
Foundation for sequential tasks: The next step is applying this framework to tasks like pouring, assembly, and handoffs that require orientation timing — not just positional synchrony
Built on Real Hardware. That's the Point.
Debojit's research is the kind of work that only happens when a researcher has access to real industrial hardware — not a simulation of it, not a scaled-down lab proxy, but a cobot that behaves exactly as it would on a factory floor.
At Addverb, this is the whole idea. We believe that the next generation of robotics engineers and researchers grow by working independently with real systems in real environments. The gap between what students learn and what industry needs closes only through contact with hardware that doesn't hide its complexity.
Syncro 5 is the platform that makes this possible — in classrooms, in research labs, and in projects like this one that end up being presented in Seoul and Vienna.
Working on a Robotics Project? We Want to Hear From You.
Debojit's work is part of a growing body of student and researcher projects built on Addverb platforms. If you're working on something — whether it's manipulation, motion planning, perception, multi-robot coordination, or something else entirely — we'd like to know about it.
Projects that push real hardware further are exactly what this community exists to support.
Explore open-source tools and documentation at community.addverb.ai. To share your project or discuss collaboration, write to us at academics@addverb.com.
The robots are ready. The floor is open.
Technical Appendix: Architecture & Implementation
For readers interested in the technical depth of the framework. The published paper is available via ICRA 2026 proceedings.
Framework Overview
Unified dynamical systems framework transitioning each arm from asynchronous to synchronous motion
Shared consensus clock zc synchronises both arms' progress in position and orientation
Two scalar coupling gates blend independent reach with phase-locked coordination
Obstacle modulation layer bends translational velocities around spherical obstacles without replanning
Coordination Logic
Asynchronous phase: Each arm moves independently to start position (coupling gates = 0)
Synchronous phase: Shared clock phase-locks both arms in position and orientation (coupling gates = 1)
Blended velocity field: Combines translational and rotational flows under a single consensus clock
Quaternion synchrony: Orientation coordination handled via quaternion logarithm mapping — not just position
Obstacle Modulation
Dynamic modulation matrix applied to translational velocities
Paths bent smoothly around spherical obstacles in real time
No trajectory replanning required — synchrony is preserved through pace adaptation
Validation Platforms
Two Addverb Syncro 5 (6-DoF) arms with parallel-jaw grippers
Objects tested: rigid box, bottle
Scenarios: obstacle-free and obstacle-present handovers
Results
Synchronous coupling: 5/5 successful transfers for both box and bottle
No coupling (asynchronous): 0/5 for box, 1/5 for bottle
Position and orientation errors converge to zero in all coupled trials
Future Work
Extending to sequential dual-arm tasks: pouring, assembly, timed orientation tasks
Tighter integration of end-effector orientation timing with positional convergence
Adaptation to dynamic obstacles and variable object geometries
Link to github for this project - https://github.com/Debojit-D/Consensus-DS.git
Syncro 5 is available to academic institutions through Addverb's robotics education programme. For access, open-source libraries, and collaboration enquiries, visit community.addverb.ai or write to automate@addverb.com.
Author: